










































































모델 번호 | MRC5000-L | MRC5000-U | MRC5000-Q | MRC5000-M |
설명 | 레이저 내비게이션용 범용 컨트롤러 | 3D레이저 내비게이션용 범용 컨트롤러 | QR코드 내비게이션용 범용 컨트롤러 | 마그네틱 내비게이션 범용 컨트롤러 |
치수 W x H x D(mm) | 195.5 x 125.5 x 44.5 | 195.5 x 125.5 x 44.5 | 195.5 x 125.5 x 44.5 | 195.5 x 125.5 x 44.5 |
보호등급 | IP65 | IP65 | IP65 | IP65 |
온도 | -40℃~+80℃ | -40℃~+80℃ | -40℃~+80℃ | -40℃~+80℃ |
습도 | 10%~90%RH결로 없음 | 10%~90%RH결로 없음 | 10%~90%RH결로 없음 | 10%~90%RH결로 없음 |
EMC | 공업 3급 | 공업 3급 | 공업 3급 | 공업 3급 |
IMU | √ | √ | √ | √ |
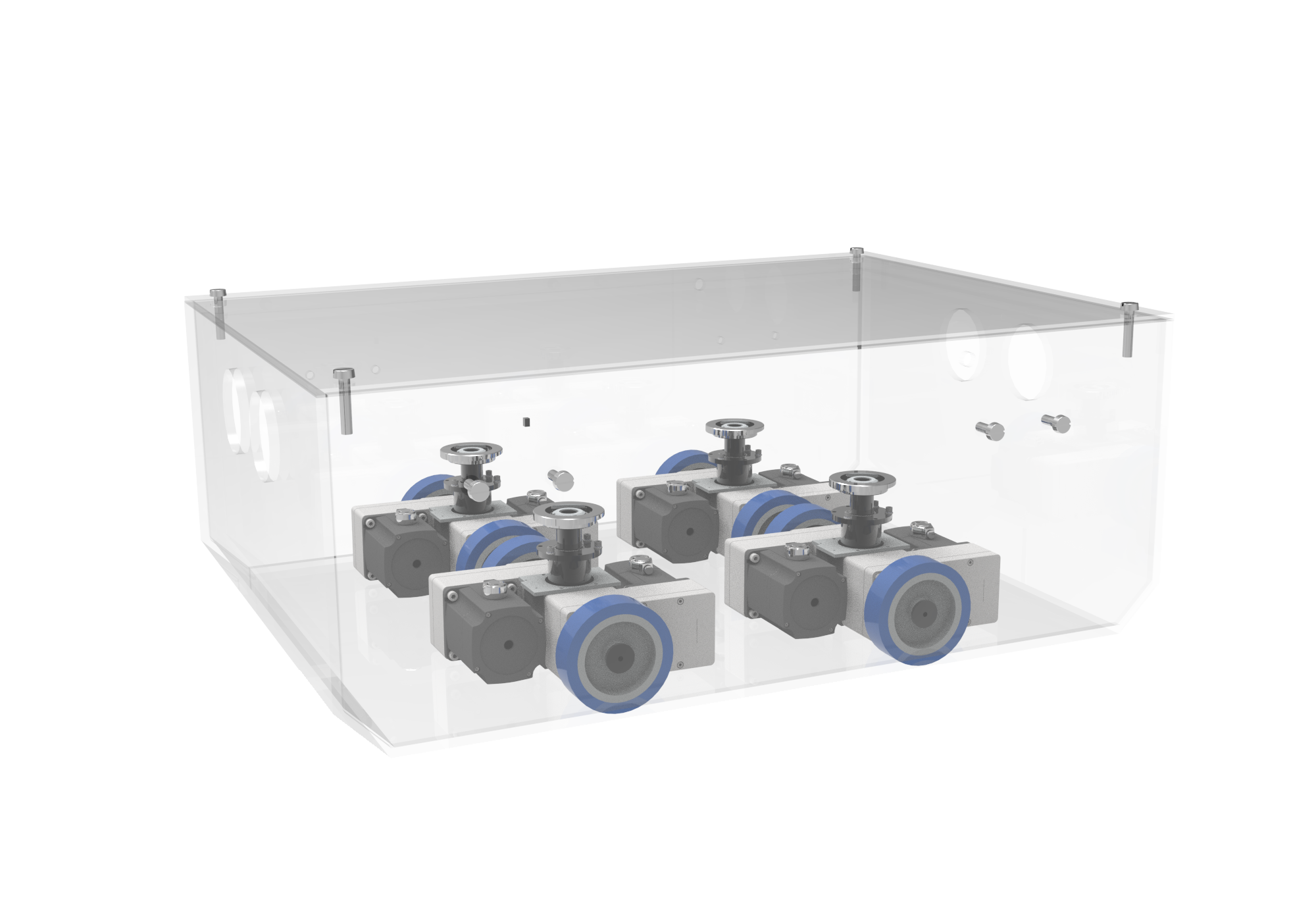
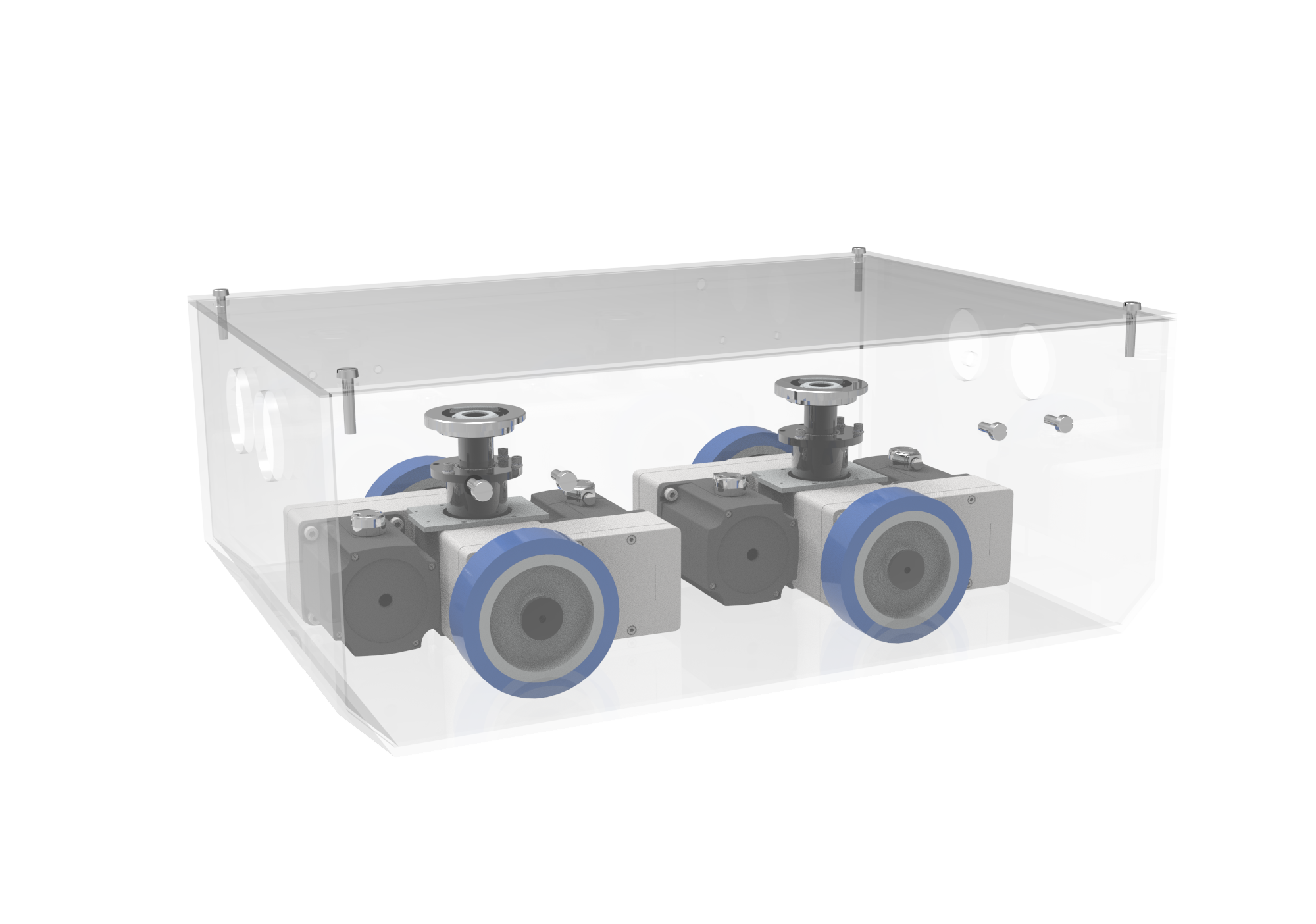
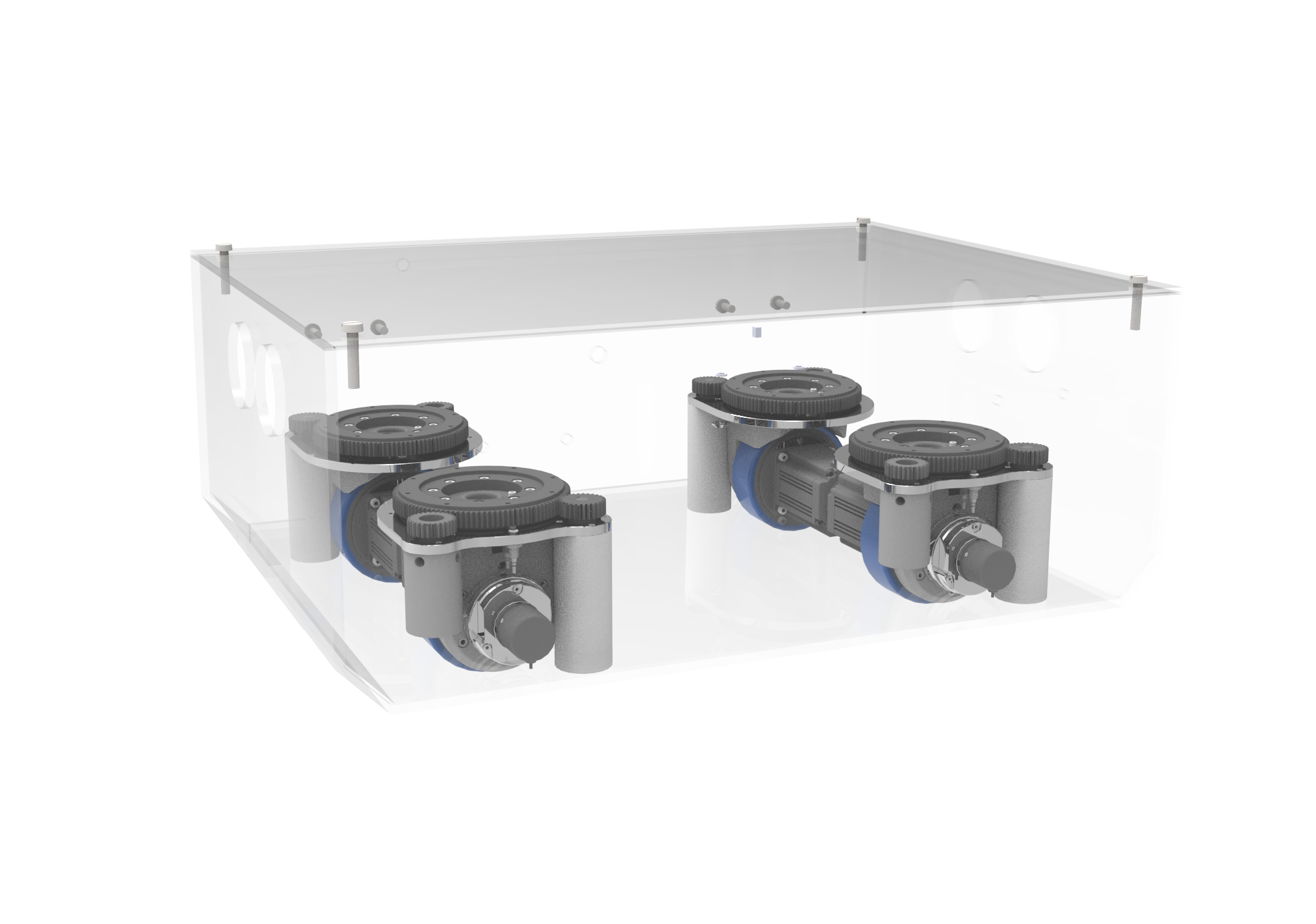
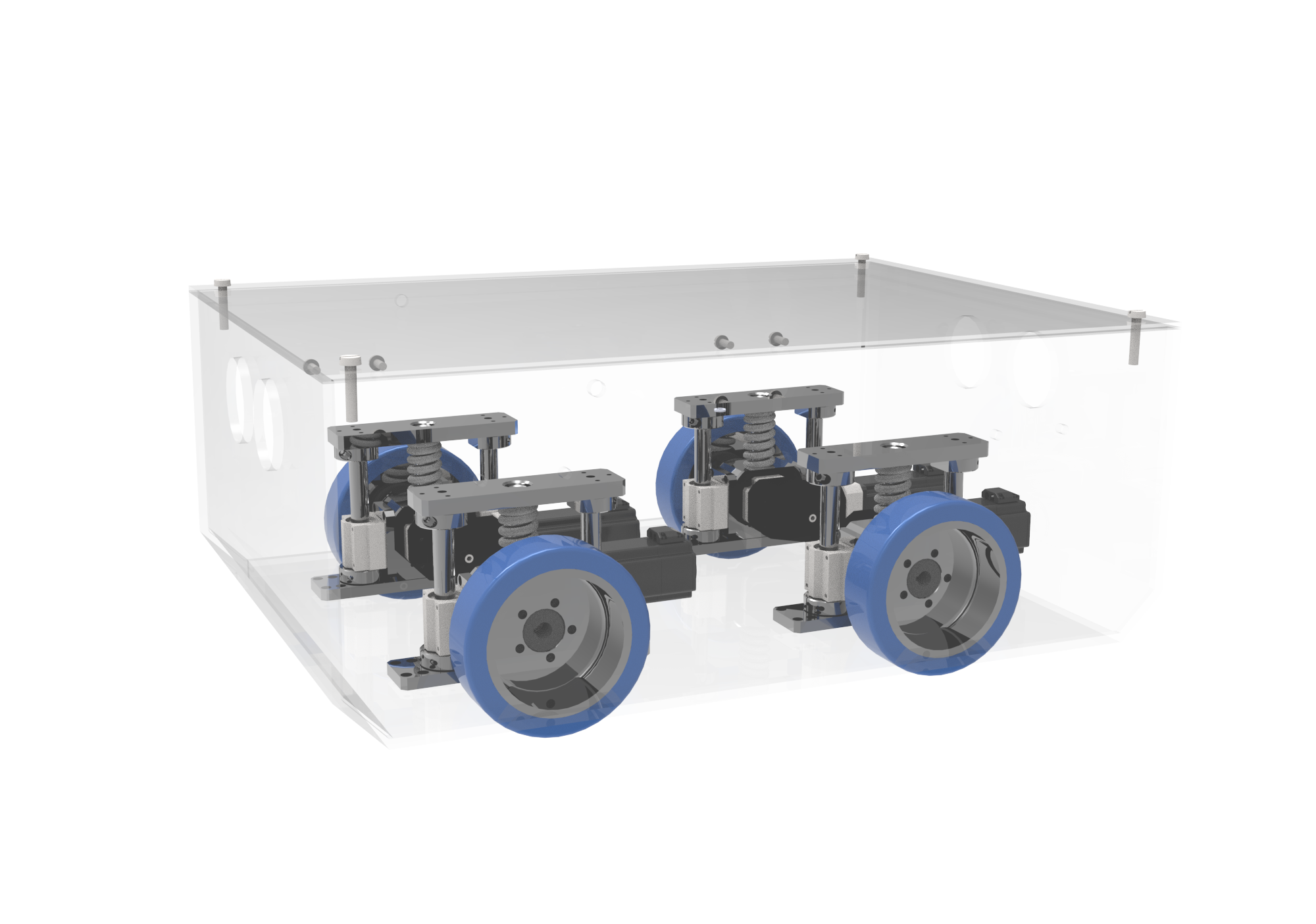
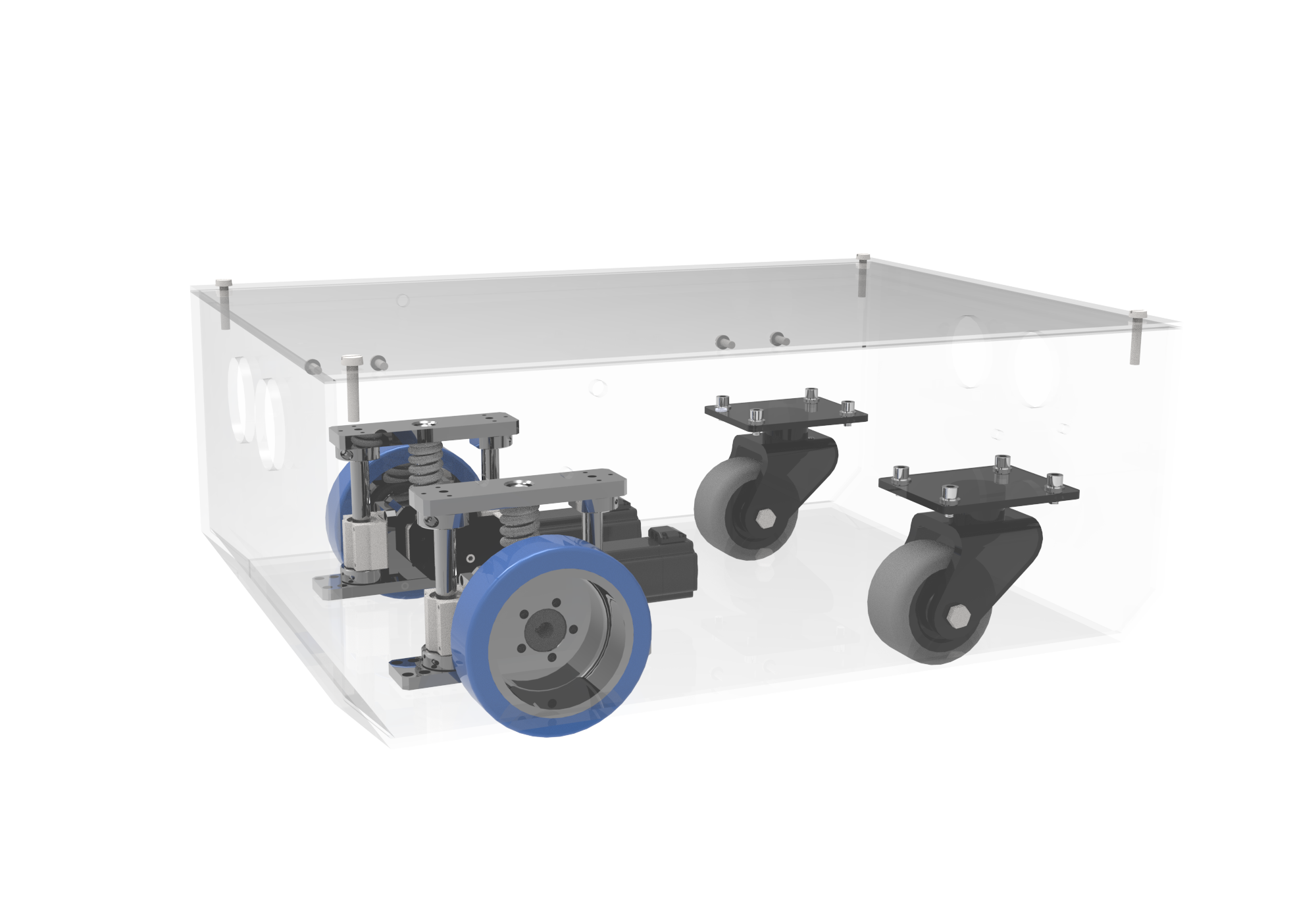
차동 섀시 모션모형 | 2WD 차동장치, 4WD차동장치 | 2WD차동장치, 4WD차동장치 | 2WD차동장치, 4WD차동장치 | 2WD차동장치, 4WD차동장치 |
타륜 섀시 모션모형 | 단타륜, 쌍타륜, 사타륜 | 단타륜, 쌍타륜, 사타륜 | 단타륜, 쌍타륜, 사타륜 | 단타륜, 쌍타륜, 사타륜 |
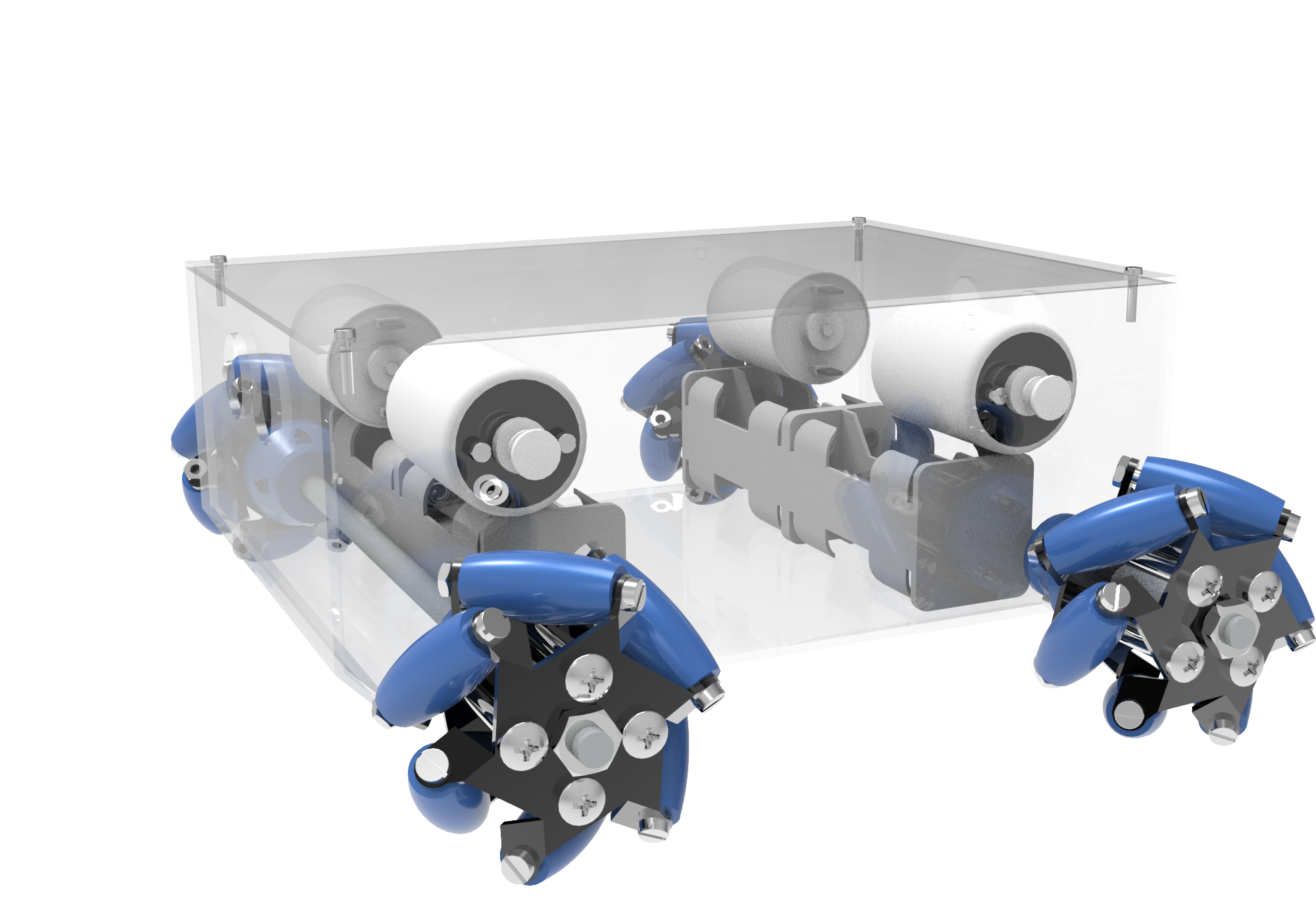
기타 섀시 모션모형 | 디퍼렌셜어셈블리, 맥나미 휠 및 맞춤형 섀시 | 디퍼렌셜어셈블리, 맥나미 휠 및 맞춤형 섀시 | 디퍼렌셜어셈블리, 맥나미 휠 및 맞춤형 섀시 | 디퍼렌셜어셈블리, 맥나미 휠 및 맞춤형 섀시 |
레이저 내비게이션 | √ | 3D레이저 내비게이션 | × | × |
QR코드 탐색 | √ | √ | √ | × |
마그네틱 내비게이션 | √ | √ | × | √ |
기타 항법 방법 | GNSS 및 기타 내비게이션 | GNSS 및 기타 내비게이션 | × | × |
위성 항법 정확도 | ±5mm | ±10mm | ±10mm | ±10mm |
각도제어정확도 | ±0.5° | ±0.5° | ±0.5° | ±0.5° |
지도 면적 | ≤400000 m2 | ≤400000 m2 | - | - |
CAN(통로) | 2 | 2 | 2 | 2 |
RS485/RS232/RS422(통로) | 1/1/1 | 1/1/1 | 1/1/1 | 1/1/1 |
AI/AO | 2/2 | 2/2 | 2/2 | 2/2 |
DI/DO/DIO | 16/16/× | 16/16/× | 16/16/× | 16/16/× |
인코더(통로) | 2 | 2 | 2 | 2 |
유선산업용이더넷 | 2 | 2 | 2 | 2 |
무선디버그인터페이스 | √ | √ | √ | √ |
로봇 설계 소프트웨어 | √ | √ | √ | √ |
로봇 공학 애플리케이션 | √ | √ | √ | √ |
로봇모니터링및스케줄링소프트웨어 | 선택 사양 | 선택 사양 | 선택 사양 | 선택 사양 |
확장된 기능 | 팔레트식별, 시각적 위치 인식, 재료식별, 추적 기능, 표지물의 2차 위치결정, 내비게이션 레이저 지원 장애물 회피, 3D 시각적 장애물 회피 | 팔레트식별, 시각적 위치 인식, 재료식별, 추적 기능, 표지물의 2차 위치결정, 내비게이션 레이저 지원 장애물 회피, 3D 시각적 장애물 회피 | 표지물의 2차 위치결정, 3D시각적 장애물 회피 | 표지물의 2차 위치결정, 3D시각적 장애물 회피 |



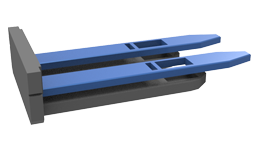
포크 운반 이동 로봇 토탈 솔루션은 이동 로봇의 전체 차량 기능에 따라 주로 제어 시스템,내비게이션 센서, 섀시 드라이브, 액추에이터, 안전 검사, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등 9개 모듈로 구성되어 있습니다.

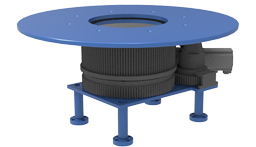
잠복 지붕 운반식 토탈 솔루션은 이동 로봇의 전체 차량 기능에 따라 주로 제어 시스템, 항법 센서, 섀시 드라이브, 실행 장치, 안전 검사, 인터랙티브 모듈, 통신 모듈, 전력 공급 장치, 추가 기능 등 9개 모듈로 나누어집니다.

협동식 (복합) 이동로봇 토탈솔루션은 이동로봇의 차량 전체의 기능에 따라 주로 제어시스템, 항법센서, 섀시 드라이브, 액추에이터, 안전검사, 인터랙티브 모듈, 통신 모듈, 전력공급 모듈, 추가 기능 등 9개 모듈로 나뉜다.

롤러형 이동로봇 토탈 솔루션은 이동로봇의 전체 차량 기능에 따라 주로 제어시스템, 내비게이션 센서, 섀시 드라이브, 액추에이터, 안전검사, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등 9개 모듈로 구성되어 있습니다.

박스형 이동로봇 토탈 솔루션은 이동로봇의 전체 차량 기능에 따라 주로 제어 시스템,내비게이션 센서, 섀시 드라이브, 실행 기구, 안전 검사, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등 9개 모듈로 구성되어 있습니다.

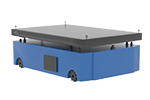
이동 로봇의 전체 기능에 따라 제어 시스템,내비게이션 센서, 섀시 드라이브, 안전 테스트, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등으로 나뉩니다.

오버로드 이동 로봇의 전체 기능에 따라 제어 시스템, 내비게이션 센서, 섀시 드라이브, 안전 테스트, 인터렉티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등으로 나누어집니다.

배낭식 이동로봇 토털 솔루션은 이동로봇의 전체 차량 기능에 따라 주로 제어 시스템, 네비게이션 센서, 섀시 드라이브, 안전 검사, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등 모듈 구성으로 나뉩니다.

주차식 이동로봇 토털 솔루션은 이동로봇의 전체 차량 기능에 따라 주로 제어시스템, 내비게이션 센서, 섀시 드라이브, 안전검사, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등의 모듈 모듈로 구성되어 있습니다.

실외형 이동로봇 토털 솔루션은 이동로봇의 전체 차량 기능에 따라 주로 제어 시스템,내비게이션 센서, 섀시 드라이브, 안전 검사, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등으로 나누어집니다.
