












































솔루션에 대한 간략한 소개
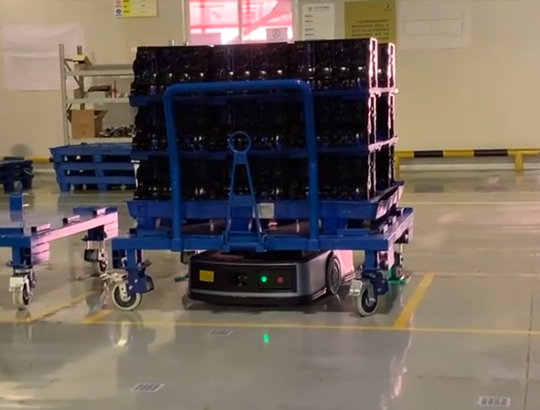
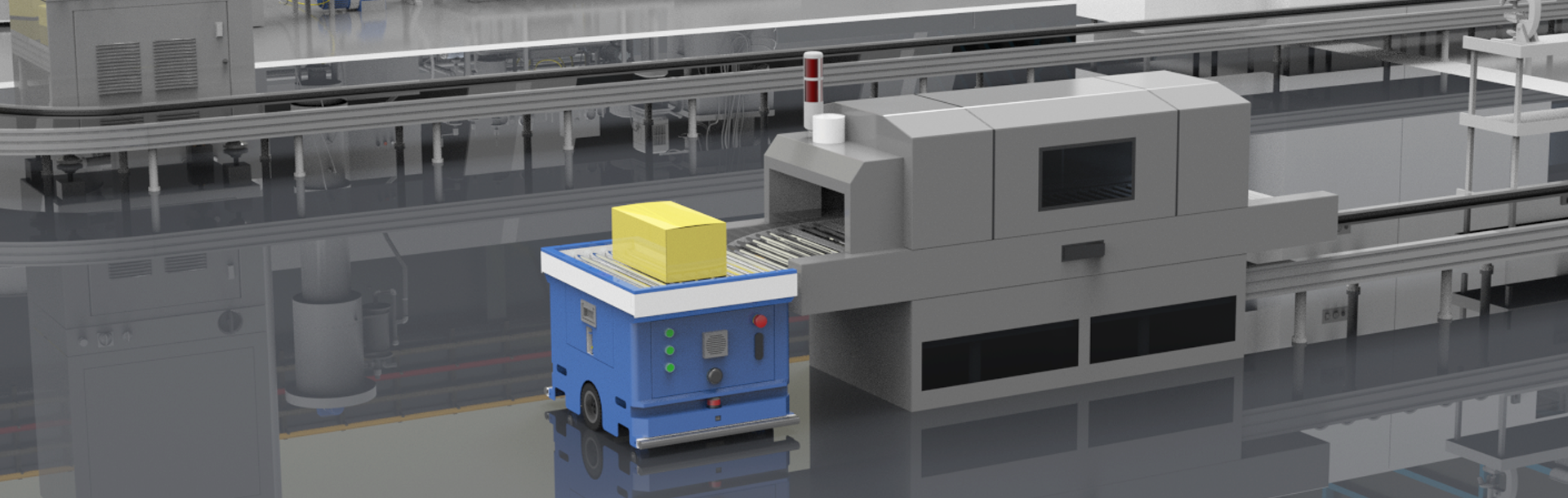
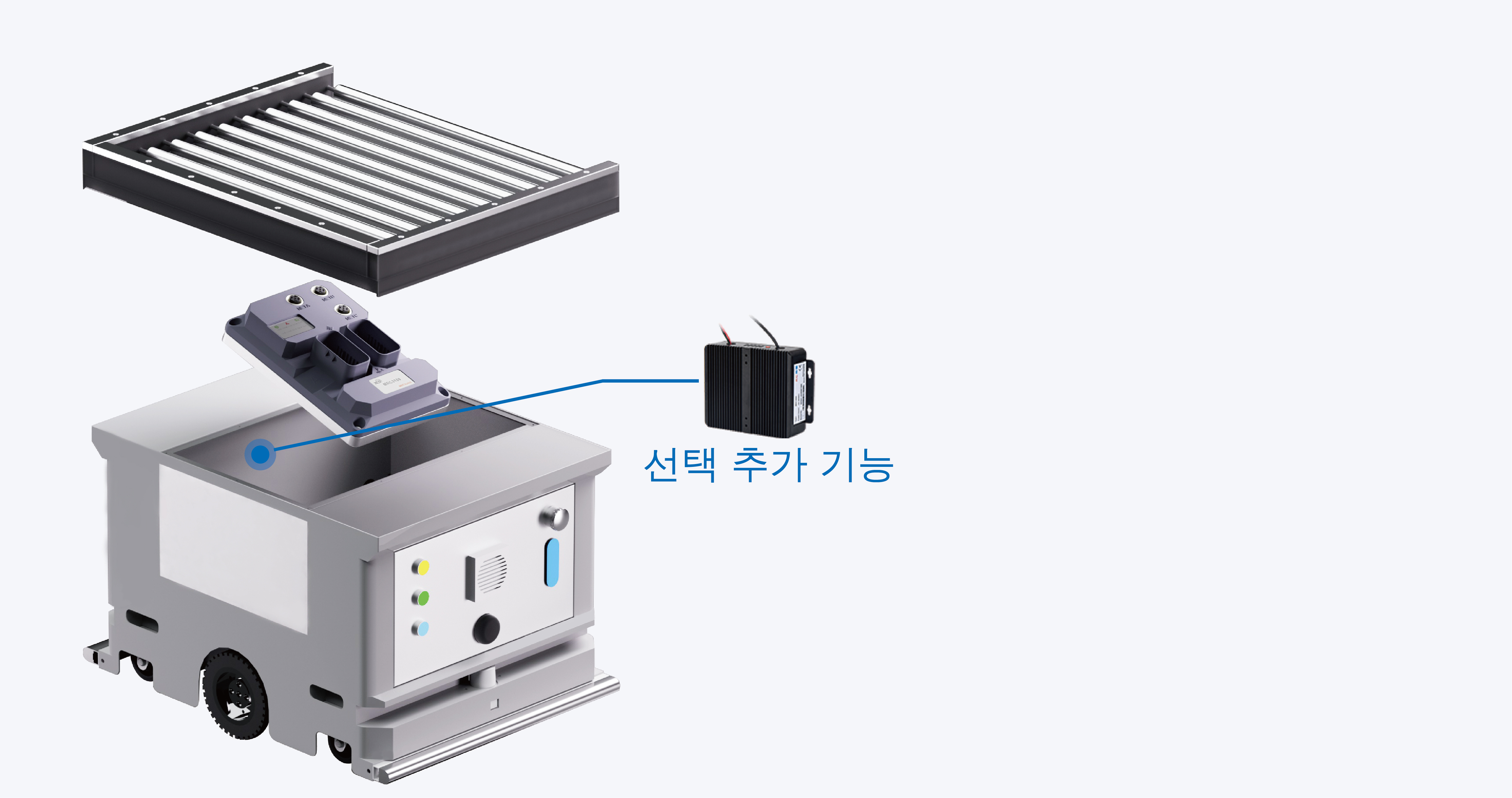
롤러식 이동 로봇은 무인 차판 운반 기초에 롤러 기구를 증가하여 생산 라인 도킹 로봇을 형성하며, 작업장과 창고, 생산 라인과 생산 라인, 생산 설비와 생산 설비 사이의 이음매 없는 연결을 실현할 수 있다.
롤러형 이동로봇 토탈 솔루션은 이동로봇의 전체 차량 기능에 따라 주로 제어시스템, 내비게이션 센서, 섀시 드라이브, 액추에이터, 안전검사, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등 9개 모듈로 구성되어 있습니다.
롤러형 이동로봇 토탈 솔루션은 이동로봇의 전체 차량 기능에 따라 주로 제어시스템, 내비게이션 센서, 섀시 드라이브, 액추에이터, 안전검사, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등 9개 모듈로 구성되어 있습니다.
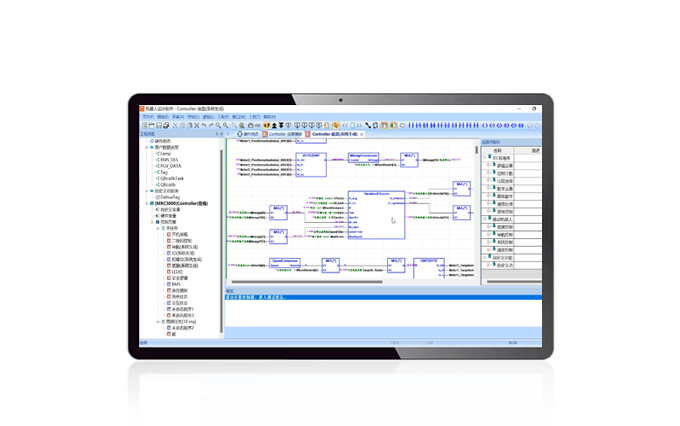
프로그램의 구성


범용 모바일 로봇 컨트롤러

차속 이동 로봇 컨트롤러

QR 코드 네비게이션 전용 컨트롤러


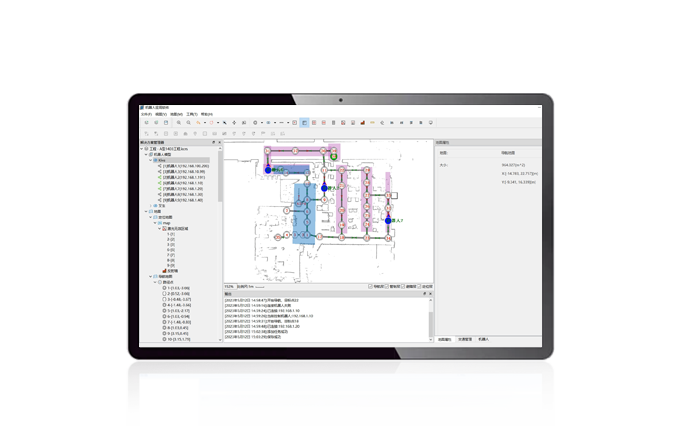
2D 레이저 거리계
2D 레이저 거리계

QR 코드 카메라


차동(휠)

맥넘 륜선
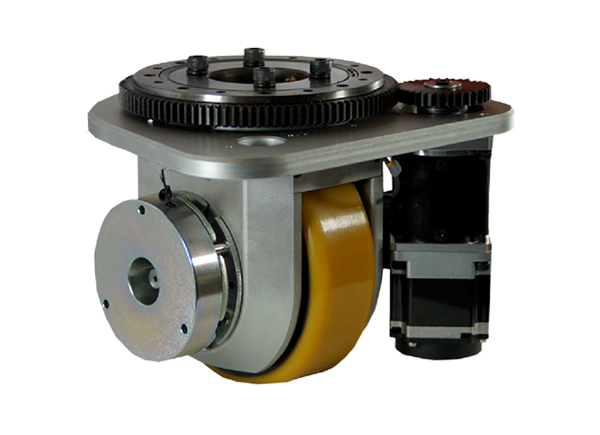
타륜

서보 드라이브

모터

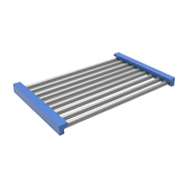
롤러 메커니즘

서보 드라이브
서보 모터


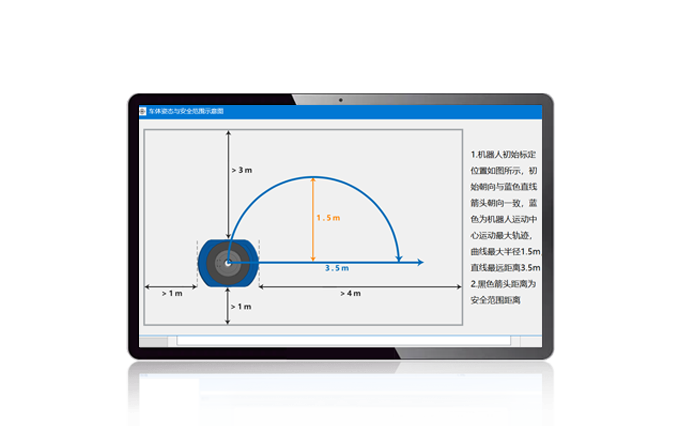
레이저 장애물 회피 센서

비전 기반 장애물 회피 모듈


유선 드라이버

호출 모듈

차량용 디스플레이

스위치

조명


무선 클라이언트


배터리
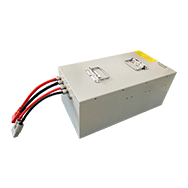
배터리

QR 코드 카메라

비전 기반 장애물 회피 모듈

양안 카메라
관련 사례

롤러 이동 로봇
네비게이션 방식:레이저 방식
차대 방식:2단 변속기
네비게이션 정밀도:±10mm
차대 방식:2단 변속기
네비게이션 정밀도:±10mm

© 2023 Zhejiang KeCong Control Technology Co., Ltd. 모든 권리 보유.| 이동 로봇들을 사람에게 서비스 하도로 합시다! 절강경찰 제33052302000842 저장 성 ICP 번호 19001570-1 sitemap.xml