



























































모델 번호 | FRC5000-L005 | FRC5000-L108 | FRC5000-L006 | FRC5000-Q006 |
설명 | Single Steering Wheel 레이저 네비게이션 컨트롤러 | 4 Steering Wheel 전문 컨트롤러 | 2 Steering Wheel 레이저 네비게이션 컨트롤러 | 2 Steering Wheel 전문 컨트롤러 |
사이즈 W x H x D(mm) | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 |
방호 등급 | IP65 | IP65 | IP65 | IP65 |
온도 | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ |
습도 | 10%~90%RH노주 없음 | 10%~90%RH노주 없음 | 10%~90%RH노주 없음 | 10%~90%RH노주 없음 |
EMC | 공업 3급 | 공업 3급 | 공업 3급 | 공업 3급 |
IMU | √ | √ | √ | √ |
DD타입 모션 | × | × | × | × |
S/D 타입 모션 | Single Steering Wheel | 4 Steering Wheel | 2 Steering Wheel | 2 Steering Wheel |
기타 모션 | × | 4륜구동 차동장치/스티어링 휠 조립체 구동부 디자인 | × | × |
레이저 내비게이션 | √ | √ | √ | × |
QR코드 내비게이션 | × | √ | 옵션 | √ |
마그네틱 내비게이션 | 옵션 | × | × | × |
기타 내비게이션 | × | 하이브리드 네비게이션 | × | × |
GNSS 내비게이션 정밀도 | ±5mm | 레이저 자연 내비게이션 ±10mm, 레이저 역방향 내비게이션 ±5mm, 2D 코드 내비게이션 ±10mm | ±5mm | ±10mm |
각도 정밀도 | ±0.5° | ±1° | ±0.5° | ±1° |
매핑 면적 | ≤400000 m2 | ≤400000 m2 | ≤400000 m2 | ≤400000 m2 |
CAN(커넥터) | 3 | 3 | 3 | 3 |
RS485/RS232/RS422(커넥터) | 4/1/× | 4/1/× | 4/1/× | 4/1/× |
멀티플렉스 통신(커넥터) | 1(CAN/RS485/RS232가능) | 1(CAN/RS485/RS232가능) | 1(CAN/RS485/RS232가능) | 1(CAN/RS485/RS232가능) |
PWM(커넥터) | 4 | 4 | 4 | 4 |
AI/AO | × | × | × | × |
DI/DO/DIO | 20/12/4 | 20/12/4 | 20/12/4 | 20/12/4 |
인코더(커넥터) | 2 | 2 | 2 | 2 |
오디오 인터페이스 | 1 | 1 | 1 | 1 |
유선 산업용 이더넷 | 3 | 3 | 3 | 3 |
무선 디버깅 인터페이스 | √ | √ | √ | √ |
로봇 디자인 소프트웨어 | √ | √ | √ | √ |
로봇 응용 소프트웨어 | √ | √ | √ | √ |
로봇 모니터링 및 스케줄링 소프트웨어 | 옵션 | 옵션 | 옵션 | 옵션 |
확장 모듈 | 파렛트, 비젼 위치 인식, 표시물 2차 위치인식, 레이저 장애물 회피, 3D 비젼 장애물 회피 | 파렛트, 비젼 위치 인식, 표시물 2차 위치인식, 3D 비젼 장애물 회피 | 파렛트, 비젼 위치 인식, 표시물 2차 위치인식, 레이저 장애물 회피, 3D 비젼 장애물 회피 | 파렛트, 비젼 위치 인식, 표시물 2차 위치인식, 3D 비젼 장애물 회피 |



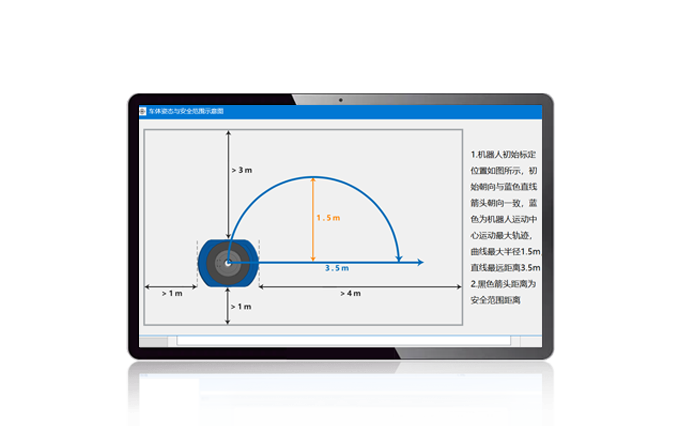
포크 운반 이동 로봇 토탈 솔루션은 이동 로봇의 전체 차량 기능에 따라 주로 제어 시스템,내비게이션 센서, 섀시 드라이브, 액추에이터, 안전 검사, 인터랙티브 모듈, 통신 모듈, 전원 공급 장치, 추가 기능 등 9개 모듈로 구성되어 있습니다.
