













































소프트웨어 소개
로봇 디스패칭 시스템 V5.2.0 버전은 다중 에이전트 스케줄링 및 작업 관리용 플랫폼형 시스템입니다.
다양한 AI 알고리즘을 적용하여 이동 로봇 군집의 경로 계획, 교통 관리, 작업 할당, 생산성 최적화, 시각화 상태 모니터링, 지도 유지 및 공유, 다기종 협업 디스패칭 등을 실시간으로 처리합니다.
또한 표준화된 개방형 API와 SDK를 제공하여, 고객의 비즈니스 시스템과 손쉽게 연동 및 개발·접속이 가능합니다.
주요 기능

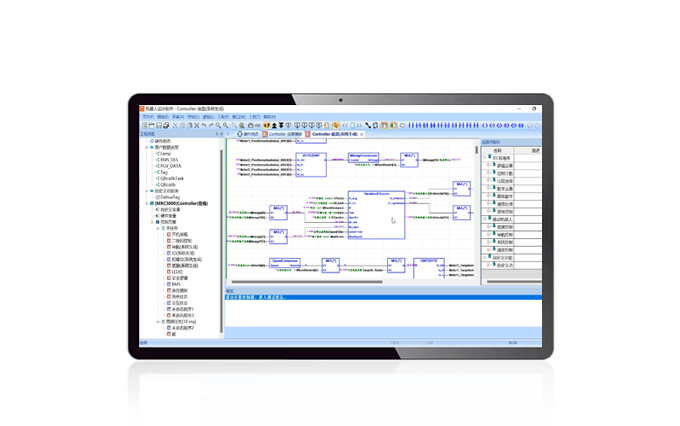
비즈니스 알고리즘 성능 향상
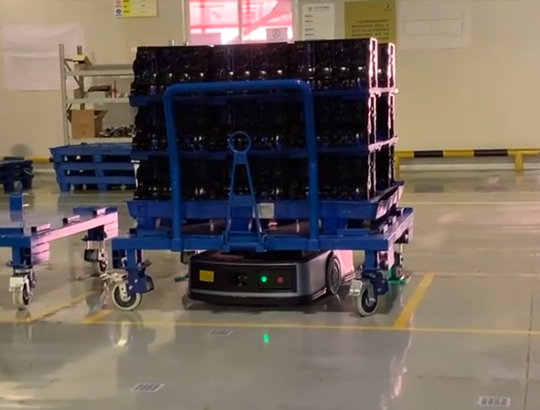
업무 요구와 장비 상태에 따라 최적의 작업 경로를 동적으로 할당합니다.
여러 대의 로봇이 동시에 이동할 때 교통을 효율적으로 제어하여 충돌을 방지합니다.
공정 특성과 작업 우선순위에 기반해 멀티태스크 병렬 스케줄링을 구현하며,
작업 전 잠재적 충돌 지점을 사전 예측 및 조율하여 지연과 예외 상황을 최소화합니다.
여러 대의 로봇이 동시에 이동할 때 교통을 효율적으로 제어하여 충돌을 방지합니다.
공정 특성과 작업 우선순위에 기반해 멀티태스크 병렬 스케줄링을 구현하며,
작업 전 잠재적 충돌 지점을 사전 예측 및 조율하여 지연과 예외 상황을 최소화합니다.
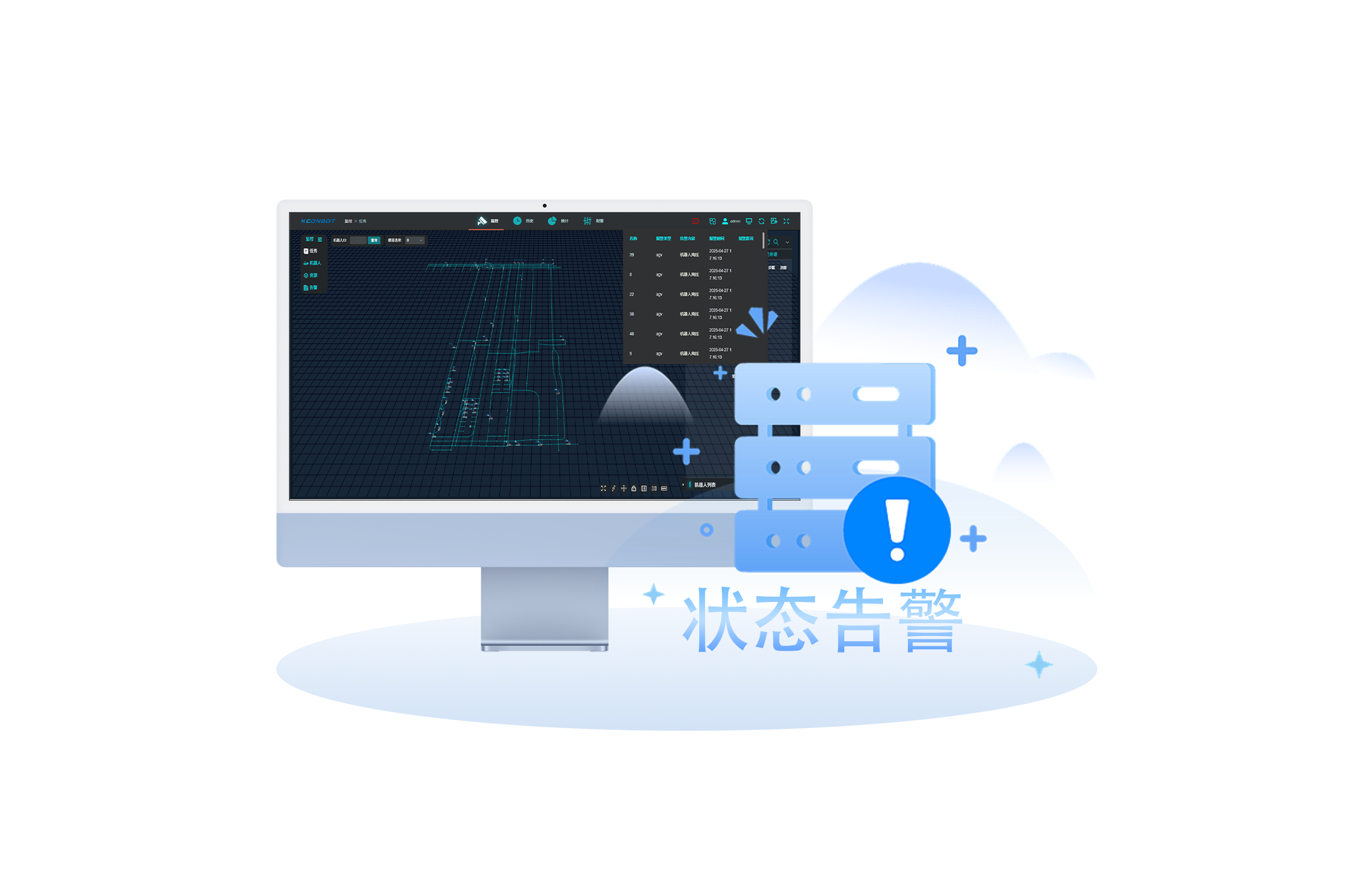
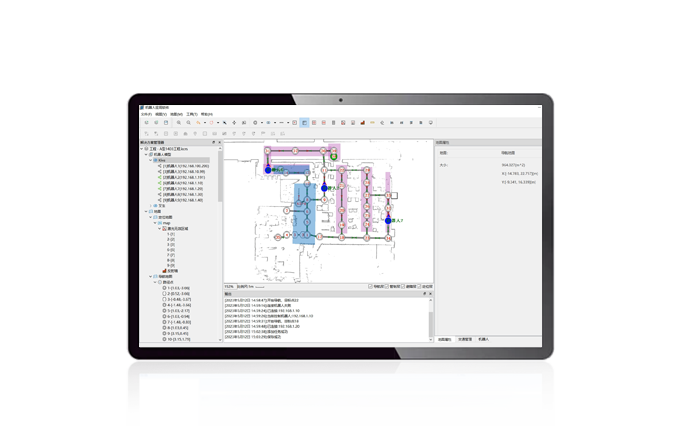
작업 상태 알림 & 영상 재생
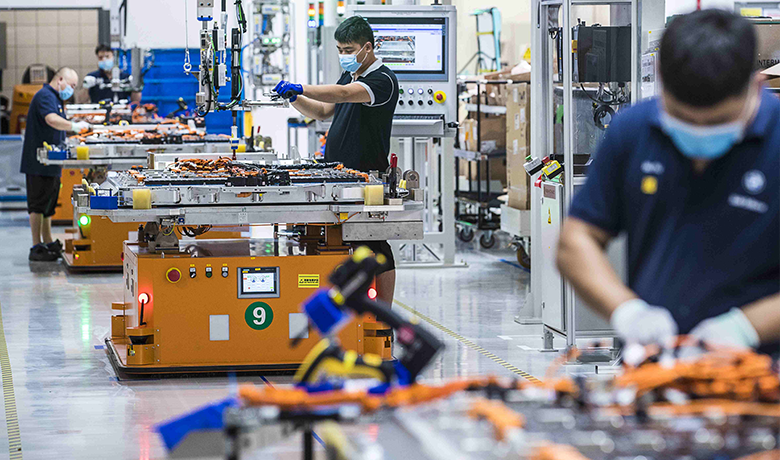
실시간으로 작업 진행 상황을 모니터링하고, 이상 발생 시 즉시 알림을 제공합니다.
화물 적체나 작업 지연과 같은 상황에서는 자동 경보를 발령하며, 차량 단말기와 관제 플랫폼에 동시 알림을 표시합니다.
또한 영상 기록 및 재생 기능을 지원하여, 사용자는 최근 한 달간의 작업 영상을 추적 및 확인할 수 있습니다.
화물 적체나 작업 지연과 같은 상황에서는 자동 경보를 발령하며, 차량 단말기와 관제 플랫폼에 동시 알림을 표시합니다.
또한 영상 기록 및 재생 기능을 지원하여, 사용자는 최근 한 달간의 작업 영상을 추적 및 확인할 수 있습니다.

시뮬레이션 시스템 기능
90% 이상의 시뮬레이션 정확도를 보장하며, 최대 1,000대 이상의 AGV 동시 운행을 지원합니다.
시뮬레이션과 실제 차량을 결합해 솔루션의 **실현 가능성과 안정성(robustness)**을 검증할 수 있습니다.
시뮬레이션과 실제 차량을 결합해 솔루션의 **실현 가능성과 안정성(robustness)**을 검증할 수 있습니다.

공작기계 연동
공정 요구에 따라 자동으로 상·하차 작업을 생성하여 공작기계와 유연하게 연계합니다.
이를 통해 스마트하고 유연한 생산 연결을 실현합니다.
이를 통해 스마트하고 유연한 생산 연결을 실현합니다.

이력 작업 · 로그 조회 & 비즈니스 시각화
과거 작업 및 로그를 조회·분석하여 비즈니스 추적과 이상 원인 파악을 지원합니다.
축적된 데이터를 기반으로 한 통계 분석을 통해 기업이 스케줄링 전략과 자원 배치를 최적화할 수 있도록 돕습니다.
축적된 데이터를 기반으로 한 통계 분석을 통해 기업이 스케줄링 전략과 자원 배치를 최적화할 수 있도록 돕습니다.
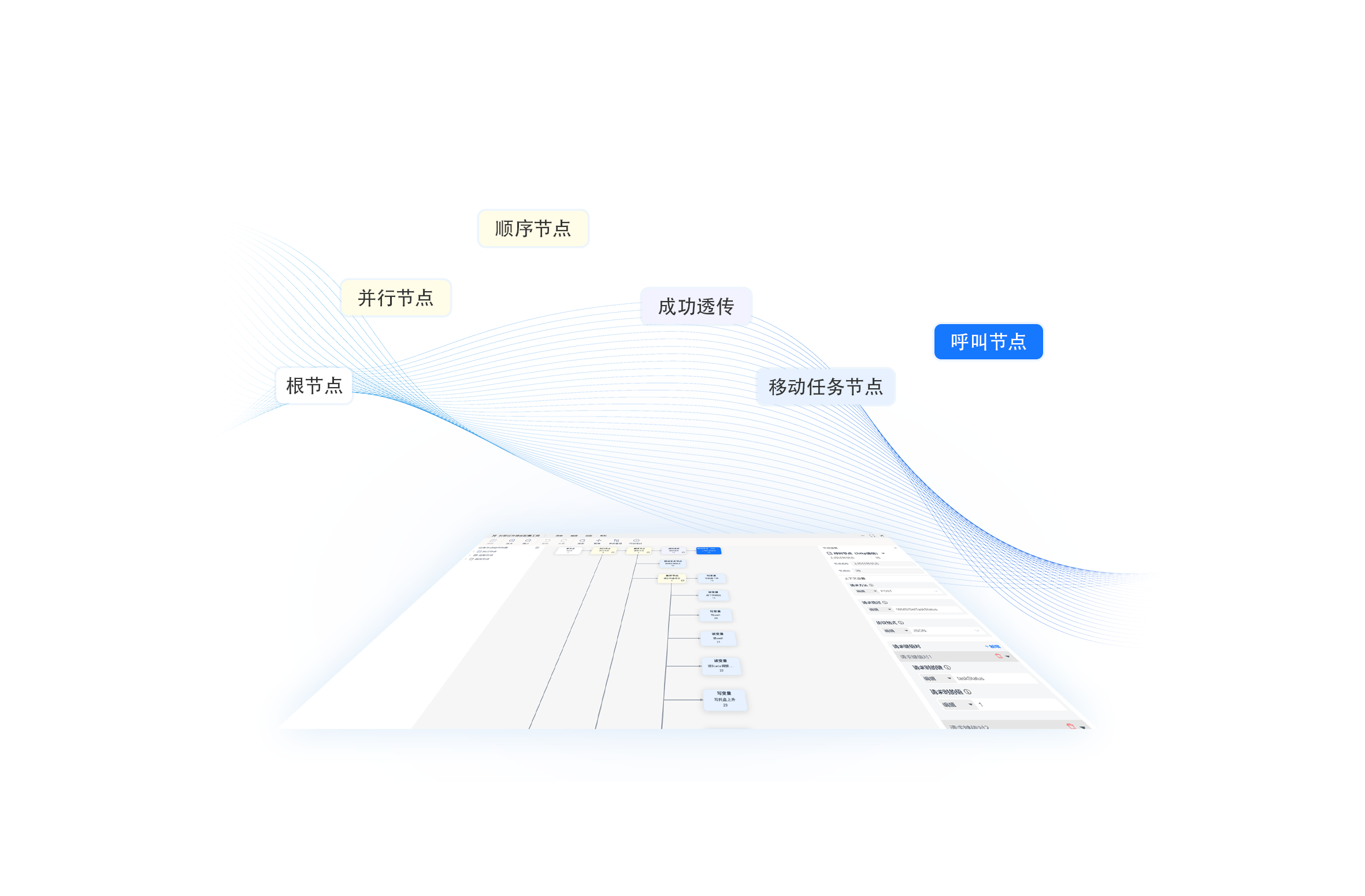
간편한 설정 & 신속한 배포 검증
표준화된 설정 프로세스를 지원하여 단기간 내 시스템을 가동하고 비즈니스 검증을 완료할 수 있습니다.
신속한 배포로 더 빠른 생산 전환을 실현합니다.
신속한 배포로 더 빠른 생산 전환을 실현합니다.

© 2023 Zhejiang KeCong Control Technology Co., Ltd. 모든 권리 보유.| 이동 로봇들을 사람에게 서비스 하도로 합시다! 절강경찰 제33052302000842 저장 성 ICP 번호 19001570-1 sitemap.xml